
電気電子情報工学科 元木研究室紹介
川島 諒 (博士前期課程 元木研究室)
古谷 勇二 (博士前期課程 元木研究室)
昨今、ロボット学は、機械・電気・電子・情報分野など様々な学問を必要とする総合領域の学問になりつつあります。つまり,ロボットに関する研究をするということは,ものづくりのための総合的な知識・技術が必要となります。例えば,二足歩行ロボットを開発する場合,構造を設計するためには機械工学が必要であり,各関節を構成するアクチュエータ(サーボモータなど)の選定には,その特性(トルク,回転速度など)を知るために電気工学が必要です。また,様々なセンサを搭載する場合は電子工学が必要ですし,コントロールボードの開発にはアクチュエータやセンサを制御するためにプログラミングの知識が必要です。
本研究室では,ロボットのハードウェアからソフトウェアまで,ロボットに関する総合的な研究を行っていますが,二足歩行ロボットや車輪型ロボットを自律的に行動させるための研究を重点的に行っています。また,そのための専用コントロールボードやシミュレータを開発したり,ロボットの形状や関節数等のデザインに関する研究もしています。
【研究テーマ例】
・二足歩行ロボットの機械学習による行動決定法
・視覚センサを搭載した二足歩行ロボットの開発
・二足歩行ロボットの歩行安定性を考慮したデザインに関する研究
・車輪型ロボットを用いたマルチエージェントに関する研究
・車輪型ロボットのための3Dシミュレータ開発
・RoboCup Soccerシミュレーションリーグのチーム作成

<二足歩行ロボット>

<シミュレーションリーグ>
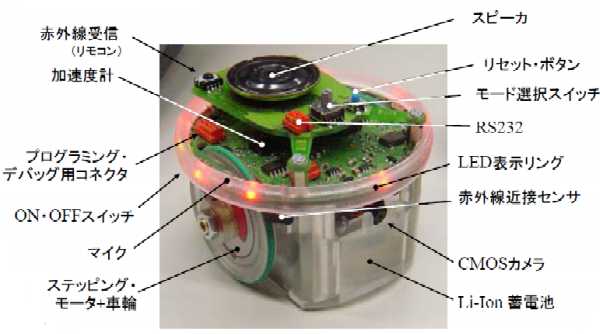
<車輪型ロボット>
燦葉会 電気・電子工学部会会報 No.30
目次
今年度の抱負
評議員会報告
活動方針について
電気電子情報工学科近況について
卒業祝賀会
年会費納入のお願い
元木研究室紹介
各種奨励賞・優秀賞
125周年記念事業への対応願
部会再編特別委員会の活動報告
部会役員
ホームページだより
各種行事のご案内
編集後記